

无人机吊舱(Drone Pod)是无人机挂载的多功能任务载荷模块,集成了光电传感器、稳定平台、控制系统和光学镜头,用于实时获取地面或空中目标的可见光、红外、激光等多光谱信息,其性能优劣直接影响无人机在军事、民用等领域的应用效果。
1、无人机吊舱的光学应用原理
无人机吊舱的光学系统通过多波段协同工作实现全天候、多场景探测:
01、可见光成像
利用CMOS/CCD传感器捕捉400-700nm波段图像,用于白天高清侦查。
02、红外热成像
通过制冷/非制冷红外探测器(3-5μm或8-14μm波段)探测目标热辐射,实现夜间或烟雾环境成像。
03、激光测距与指示
发射905nm或1550nm激光脉冲,通过飞行时间(ToF)计算目标距离,或为武器提供制导标定。
04、多光谱融合
结合可见光、红外、激光数据,通过算法融合提升目标识别精度。
2、无人机吊舱核心光学镜片元件
无人机吊舱的光学性能高度依赖以下镜片元件:
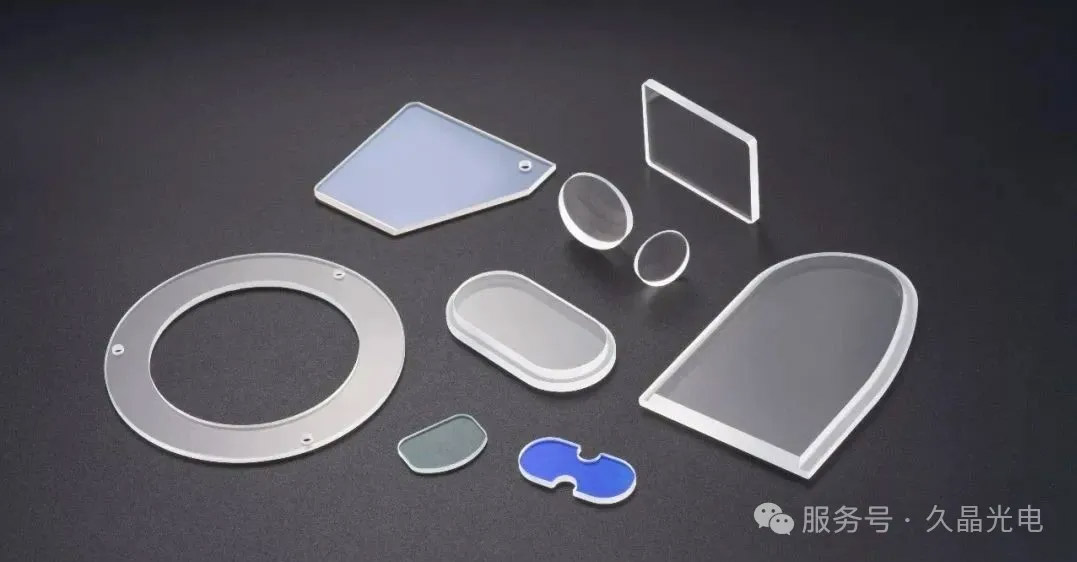
01、保护窗口镜片
防护内部光学系统免受风沙、雨水、紫外线侵蚀,同时维持高透光率,常规采用蓝宝石(硬度9M)、熔融石英(耐高温)、ZnSe(红外窗口)等材料,通过光学镀制增透膜(AR,反射率<0.5% @工作波段)+防水防污膜。
关键指标:
①透过率 >95%(可见光)
②表面硬度 ≥8H(铅笔硬度)
③抗雨蚀速度 ≥150m/s(军用标准)
02、物镜组(成像透镜)
将目标光线聚焦到传感器,决定成像分辨率与视场角(FOV),一般采用多片式设计,用4-10片球面/非球面透镜组合,用于校正像差(球差、色差),通过电动驱动透镜组移动变焦模块实现光学变焦(如10-300mm焦距)。

关键指标:
①MTF(调制传递函数)>0.3 @100 lp/mm
②畸变 <1%(广角端)
③F数(光圈)1.4-4.0(低照度优化)
03、分光镜
分光镜(Beam Splitter):负责将入射光按波长/偏振分束,实现多传感器(如可见光+红外)同步工作,常规采用如70%透射可见光,30%反射红外光分光比、偏振消光比 >100:1的分光片。
04、红外截止滤光片(IR-Cut)
阻挡红外光,提升可见光成像色彩真实性。窄带滤光片:提取激光回波信号(如1550nm±5nm),抑制背景噪声。指标:截止深度 >OD4,透射率 >90%。
3、典型应用场景与镜片选择
|
场景 |
核心需求 |
镜片配置 |
|
边境巡逻 |
昼夜温差、沙尘环境适应性 |
长波红外硫系镜头+激光测距滤光片(1550nm±5nm) |
|
电力巡检 |
高精度电晕放电检测 |
电动变焦物镜(20-200mm)+紫外滤光片(截止深度>OD4) |
|
农业监测 |
植被健康指数分析 |
多光谱滤光片轮(红边、近红外波段)+窄带滤光片(透射率>90%) |
|
灾害救援 |
烟雾穿透与夜间成像 |
红外热成像镜头(8-14μm)+可见光广角镜头(畸变校正<1%) |
|
军事侦察 |
远距离目标识别与跟踪 |
连续变焦物镜(10-300mm)+自适应光学(AO)镜片(校正大气湍流) |
光学元件是无人机吊舱的“视觉神经”,其性能直接决定了无人机在复杂任务中的感知能力与执行效率。高精度镜头、多光谱滤光片及红外传感器等光学组件,如同为无人机装上了“透视眼”与“夜视仪”,能够在千米高空捕捉地面细节,实现全天候侦察与目标识别。
未来,随着材料科学、智能算法、量子技术的突破,光学系统将向轻量化、高集成度、多模态感知方向发展,进一步拓展无人机在军事侦察、应急救援、智慧农业等领域的边界。